Autopilot capabilities
Printed From: Avidyne
Category: Avidyne General
Forum Name: IFD 5 Series & IFD 4 Series Touch Screen GPS/NAV/COM
Forum Description: Topics on Avidyne's IFD 5 Series and IFD 4 Series Touch Screen GPS/NAV/COM
URL: http://forums.avidyne.com/forum_posts.asp?TID=324
Printed Date: 29 Apr 2024 at 9:19am
Software Version: Web Wiz Forums 12.01 - http://www.webwizforums.com
Topic: Autopilot capabilities
Posted By: Paul
Subject: Autopilot capabilities
Date Posted: 31 Oct 2013 at 12:21pm
The autopilot in my aircraft, a KAP 140, does not provide GPSS roll steering. It sounds like the IFD 540 will not give me this capability (although I would like that confirmed by Avidyne). I can see four choices, in order from most to least expensive:
Is roll steering is worthwhile in a Cessna 172 with a single axis autopilot? Which of these could be installed with the IFD 540 in a certificated 172? The Icarus has a display and some capabilities that the DAC does not. It also requires panel space which would be difficult to come by. Does the IFD 540 have features which make the Icarus' extra capabilities redundant? If I'm going to add this capability I would prefer to do it when the IFD 540 is installed. That saves on installation costs. And the pilot won't have to deal with the panel changing twice. |
Replies:
Posted By: chflyer
Date Posted: 31 Oct 2013 at 2:23pm
|
Paul, I expect the IFD 540 to behave like a GNS 430W in this respect, and the key to determining your GPSS options will be the capabilities and input requirements of the AP…. but one never knows what surprise Avidyne might have up their sleeves. I have a 430W and Sandel HSI feeding an STEC GPSS which in turn feeds an STEC 30 AP. The GPSS is a stand-alone unit with just a square push-button on the panel that toggles between 2 modes: HDG & GPSS and determines the nav source: AC/DC heading error or GPS roll steering data. The STEC 30 has 4 roll modes: Stabilizer (which is controlled by turn left/right knob), Heading, and Lo/Hi Track. The AP is normally set in HD mode as long as the 430W is producing GPS roll steering data (i.e. following a flight plan or approach procedure), and the GPSS should be in GPSS mode. The GPS roll steering output is wonderful and will make lovely smooth DME arcs, intercepts, turn anticipation, etc, following a GPS overlay of a VOR/LOC proc. If the GPSS is in HDG mode, then the HSI/DG heading bug output is used if the AP is in heading mode or 430W VOR/LOC AC/DC heading error if the AP is in Lo/Hi Track mode (Lo for VOR, Hi for LOC/ILS). I'm not sure, but I suppose that in this case the GPSS is in a sort of pass-through mode of the heading error signal to the AP. I'm certain that once you have seen GPSS performance, you won't want to be without it due to the accuracy and functionality of the GPS roll steering data. If I recall correctly, the STEC GPSS was about $1000 and really gets the most out of a GPS. I'm not familiar with the capabilities of the Icarus or DAC units. I don't know if the STEC GPSS unit will only mate with a rate-based AP like STEC produces, but perhaps the AC/DC heading error signal is standardised and accepted by both rate and attitude based AP's. Vince ------------- Vince |
Posted By: ddgates
Date Posted: 31 Oct 2013 at 4:00pm
|
GPSS is amazing. ------------- David Gates |
Posted By: Paul
Date Posted: 31 Oct 2013 at 4:10pm
The IFD 540 is (supposedly) amazing. The amount of money I'm spending on all of this is really amazing. For the benefit of those of us who have never flown in a GA aircraft with GPSS, could you please provide a bit more information? |
 ddgates wrote:
ddgates wrote:Posted By: phkmn
Date Posted: 31 Oct 2013 at 5:38pm
|
GPSS processing takes advantage of the GPS' knowledge of your current and future course, ground speed and ground track. Combined with WAAS, precise information is available about current location so that a track can be followed exactly. Turns are anticipated, so there's no overshoot when course changes with waypoint passage. GPSS will fly accurate holds with crosswinds and with a capable autopilot will make smooth and seamless transitions from enroute to approach modes right to the runway threshold. You will have to manage your own altitude unless the a/p has a glideslope capability. As a 530 replacement, I don't consider it reasonable to expect GPSS built into the 540. ------------- PH |
Posted By: MysticCobra
Date Posted: 31 Oct 2013 at 8:08pm
|
Here's one common example of what GPSS roll steering offers: Many small aircraft have a single-axis autopilot that works with a combination of desired heading (where the bug on the heading indicator is set) and GPS CDI needle deflection. If HI shows right of course, and the CDI needle shows right of course, the autopilot will input a left roll to try to correct. This setup allows the aircraft to follow a straight course line, but at the next GPS waypoint with a heading change, the pilot needs to adjust the bug on the HI appropriately for the system to track that next, different, straight course line. This setup will not allow the aircraft to follow a curved path in the flight plan, at least not without the pilot continually adjusting the HI bug, which is not really practical. With GPSS, the dependency on the heading indicator bug is removed. Now, with no action required from the pilot, the autopilot can smoothly fly all the turns in the GPS's flight plan, including course reversals, holding patterns, DME arcs, etc. Pilot just sits back and watches. It's a very nice feature. Just expensive.
|
Posted By: AviJake
Date Posted: 01 Nov 2013 at 7:34am
|
The IFD540 sends GPSS Roll Steering commands to an autopilot via Arinc 429 (Label 121). Since the KAP140 doesn’t support GPSS nor does it support Arinc 429, you need an intermediate translator to convert the 429 signal into an analog voltage. So from an interfacing perspective, the IFD540 has no issues with sending roll steering command data directly to either one of those mentioned interface units (GDC31, SAM). From our perspective, the DAC GDC31 is basically the same solution the Stec65 used to add GPSS support for an autopilot that didn’t have the necessary interface from a GNS430/530. It takes 429 and directly converts that data into a heading command which in turn, gets sent to the autopilot. The SAM module is a bit more than a roll steering converter. ------------- Steve Jacobson sjacobson@avidyne.com |
Posted By: ddgates
Date Posted: 01 Nov 2013 at 5:18pm
|
I had a SAM module before I got my Aspens. Works well, and does other stuff as Steve indicated. I preferred the SAM to the GDC because you can tweak the adjustments...(not saying I did that). ------------- David Gates |
Posted By: Paul
Date Posted: 05 Nov 2013 at 8:35am
|
The SAM has a bunch of additional capabilities but the manual seems to say that it is necessary to enter the barometer reading and the altitude of the destination airport at startup. I don't know if this can be turned off or if it will be disabled if there is no encoder connected to it. I also don't know if the IFD will provide altitude warnings and other information which would make these capabilities redundant in the SAM. I don't want to add more steps to the preflight unless they really add benefit. The SAM has one GPSS feature that the GDC31 lacks. There is an input on the SAM which the GPS can use to disable roll steering. The Garmin 430W with newer firmware will do this, and the SAM will announce that it happened. There is an input on the GDC which indicates that the ARINC data is good, but if it is tripped apparently it will flash in the way it does when it faults. I don't know if this is a significant limitation. I also don't know if the IFD puts out the same signal signal since it depends on which version of the Garmin firmware it is compatible with. |
Posted By: ddgates
Date Posted: 06 Nov 2013 at 2:29pm
|
The SAM needs baro input for altitude alerting en route and gear warnings at destination. If you don't input the baro pressure - IIRC these features are disabled. ------------- David Gates |
Posted By: Don
Date Posted: 15 Mar 2015 at 12:00am
|
On this same issue with GPSS I have an stec 30 installed. And was going to get the GPSS capability added as well Supported with the ifd ?? |
Posted By: chflyer
Date Posted: 15 Mar 2015 at 1:03am
|
I have an stec 30 installed with G430 & stec GPSS. Works great! Awaiting 440 to replace G430 as plug & play, so expect it to continue to work fine... As should the IFD540. ------------- Vince |
Posted By: Don
Date Posted: 15 Mar 2015 at 9:12am
|
Thanks CH!! I was reading about it coupled to the 430 and I am coming from a KLN 94 with the 430 the gpss will fly (an ILS/LOC) the out bound leg to a procedure turn ... then the gpss is switched to hdg mode ... and hd bug is used to fly procedure turn... once inbound and on course switching back to GPSS will keep the plane on track and obviously pilot manages the glideslope. will this be the same with the 540? or with the 540, will the ap being in gpss mode fly the procedure hold...
|
Posted By: AviJake
Date Posted: 15 Mar 2015 at 10:16am
|
Yup, it'll work fine. The IFD540 is outputting roll steering signals so that if you have an autopilot that naturally supports GPSS or you have an intermediate interface unit like you're talking about with the STec 30, then you'll be fine. The autopilot will stay coupled and will fly whatever magenta line the IFD540 is outputting. In your example scenario, the system will stay coupled all the way around the procedure turn. ------------- Steve Jacobson sjacobson@avidyne.com |
Posted By: oskrypuch
Date Posted: 15 Mar 2015 at 10:20am
|
The 540 will take you right along the magenta line, entirely through an approach, or along a custom hold, as long as you have GPSS either as a separate module or integrated such as in an ASPEN, driving the autopilot, or an autopilot that can accept direct 429 roll steering commands. On ILS/LOC and VOR approaches, it will switch to VLOC (unless you suppress that), you would normally switch to the navaid for guidance once established. Inside of the FAF, of course, you must at least monitor the primary navaid for the approach, but for a VOR or LOC only approach (no vertical guidance) you might wish to continue to use GPS/GPSS for driving the lateral autopilot, it will do a better job. On the third hand, if you do that, you might lose the VSR indication that normally appears on a non-precision navaid driven approach.
* Orest |
Posted By: oskrypuch
Date Posted: 15 Mar 2015 at 10:32am
|
STEVE, Which brings to mind a potential feature. Can you add a third option in the "auto VLOC switch" setting? To ON and OFF, also add an ON PRECISION only? That is assuming that roll steering output, on a non-RNav approach, is not suppressed past the FAF. On an ILS, you must switch to get your GS. But on a straight LOC or VOR, GPSS commands will be more accurate to follow the lateral course. With the 430W I usually did leave it on GPS on such approaches, while monitoring the primary navaid on the second radio. * Orest |
Posted By: AviJake
Date Posted: 15 Mar 2015 at 10:35am
|
Orest, To clarify, are you looking for the option to auto switch to VLOC for an ILS but to stay in GPS for a localizer if you chose that new setting? I'm not sure the light bulb has turned on for me on this one yet. ------------- Steve Jacobson sjacobson@avidyne.com |
Posted By: oskrypuch
Date Posted: 15 Mar 2015 at 11:18am
|
Correct. Flying an ILS you will always want to switch to VLOC, so as to get a GS indication. Flying a VOR or LOC (no GS), you could optionally continue to use GPSS to fly the lateral course, it is generally more accurate than following the ground navaid -- keying on the assumption that 540 does not suppress the GPSS availability FAF inwards on such approaches. I like having the GPS switch to VLOC automatically,, but to do the above, would need to switch it back for VOR and LOC approaches. Having a "PRECISION ONLY" setting for the auto VLOC switch would eliminate the need to manually switch it back for those. This is not a critical issue, but it might be a nice little thing to add. On the face of it might not be too hard to do. ALSO, believe I suggested that there be some sort of aural (preferred) or CAS alert that the auto VLOC switch has taken place. Is that something you can do? * Orest |
Posted By: AviJake
Date Posted: 15 Mar 2015 at 11:19am
Okay, understood. I'll add it to the database. ------------- Steve Jacobson sjacobson@avidyne.com |
Posted By: AviJake
Date Posted: 15 Mar 2015 at 11:20am
Yes, also added to feature candidate database. ------------- Steve Jacobson sjacobson@avidyne.com |
Posted By: oskrypuch
Date Posted: 15 Mar 2015 at 11:20am
|
Boy, you're FAST, you reply even before I finish editing my message! * Orest |
Posted By: Don
Date Posted: 15 Mar 2015 at 11:29am
|
that sounds great !! thanks for the insight and info. definitely have the GPSS added to must haves !!!! Maybe find a good deal at sun n fun on the unit!!
|
Posted By: Paul
Date Posted: 29 Mar 2015 at 9:34pm
|
We now have the IFD 540 and Icarus SAM installed in the stack along with the existing KAP 140 autopilot. My wife flew an ILS approach today and could not get the autopilot to couple. Everything else seemed fine and she hand flew the approach using the crossed needles on the indicator. She had tuned the NAV radio in the IFD to the localizer and put it into VLOC mode. She hadn't entered the approach, just set the airport as a waypoint. The SAM was set to HDG mode. The KAP 140 refused to go to NAV mode (or approach mode). Any clues as to what we're missing? |
Posted By: cavu
Date Posted: 09 Aug 2015 at 4:53pm
|
The STEC-30 has two Tracking modes; LOW is for tracking a VOR enroute and the High is for more precision like an ILS and GPS. If GPSS is mated to the system and an IFD540, is it still important to select tracking HI or LO? |
Posted By: oskrypuch
Date Posted: 09 Aug 2015 at 6:30pm
GPSS mode is just HDGing mode, with the heading bug continually tricked out by the GPS navigator to follow the magenta line, the data fed to the autopilot by the GPSS module. When in GPSS mode, you don't set the A/P to NAV HI or NAV LO or APPR modes, you set it to HDGing mode. GPSS transforms your navigation. * Orest |
Posted By: AviJake
Date Posted: 09 Aug 2015 at 6:32pm
|
Agreed. ------------- Steve Jacobson sjacobson@avidyne.com |
Posted By: MysticCobra
Date Posted: 10 Aug 2015 at 7:56am
|
...but if the HI vs. LOW setting is separate from selecting the nav source (VOR / ILS / HDG), then you could probably select either mode, based on personal preference. The difference is that the LOW setting "smooths out" a noisy feedback signal; the HI setting tries to track the signal precisely (which can result in "jerky" control inputs if the signal is noisy). The LOW mode may be a more comfortable ride in bumpy weather; the HI mode may result in sharper control inputs as it fights harder to minimize any deviation from the magenta line.
|
Posted By: cavu
Date Posted: 10 Aug 2015 at 9:11am
|
I understand that the STEC GPSS system takes any deviation from the magneta line as +- deviation from the "heading bug" position. In other words, it magically substitutes the magneta line for the heading bug position regardless of the actual heading bug setting on the DG/HSI. So a couple of followup questions, would MysticCobra be correct or incorrect then? As there would be no "noise" on digital output from the IFD540, would the STEC-30 even track the magneta line if in HI or LOW position. Second, if ATC gives me a "turn 20 degrees to the right for traffic", then the procedure would be what, turn GPSS off and roll the actual heading bug to the new heading? And when time to resume own navigation, select the next point on the FP, then Direct to, then turn GPSS back on? Or if I simply turn GPSS back on without the "direct to" step, how would the autopilot respond? A 45 degree intercept to the active leg? |
Posted By: chflyer
Date Posted: 10 Aug 2015 at 9:19am
|
MysticCobra: Magenta line? I believe the magenta line is the GPS flight plan, not any VOR/ILS CDI signal which is which is what the a/p HI/LO is tracking. If GPSS is engaged then the autopilot is fed the GPS digital signals to keep on the flight plan track (magenta line), converted by the GPSS to analog so the a/p understands them. Even if the 540 is showing VLOC, I believe the GPSS will be feeding the a/p converted GPS tracking commands received from the 540. As I think Orest mentioned, this is likely as good as the LOC signal. If you want to use HI/LO, then you need to switch from GPSS mode to HDG mode (on the Stec GPSS) so that the VOR/LOC analog CDI deviation signals are passed through to the a/p rather than the digital GPS flight plan correction commands converted to analog. I don't think the GPSS knows, when it converts the 540 GPS digital commands to analog, whether the a/p is in HI or LO modus and I would expect it to generate the same analog CDI correction signals regardless of the HI/LO setting. ------------- Vince |
Posted By: chflyer
Date Posted: 10 Aug 2015 at 9:31am
|
cavu, Not if you're talking about the STEC GPSS. From the STEC GPSS manual ... "Engaging any autopilot roll mode other than HDG (i.e. NAV, APR, REV, STB, LO TRK, HI TRK) will decouple the autopilot from the GPSS mode. With the GPSS mode engaged, the autopilot will not respond to the Heading Bug or Course Pointer." For the STEC GPSS, in HDG mode, the GPSS converter will pass through AC/DC HDG error signals from the HDG system (CDI/HSI) to the a/p as DC HDG error. In GPSS mode, the GPSS converter will convert GPS bank angle & ground speed input to DC turn rate output to the a/p. Perhaps other GPSS units function different, but that is how the STEC GPSS and STEC 30 a/p work together. ------------- Vince |
Posted By: chflyer
Date Posted: 10 Aug 2015 at 9:38am
|
cavu, Regarding your "second, " question, yes. Regarding your last paragraph, you could do as you suggest or just adjust the HDG bug to bring you back onto the magenta line before re-engaging GPSS. If you just engage GPSS again as you suggest, then the a/p will again be fed the GPS correction signals being received from the 540 to get you back onto the magenta line. I'm not sure if this is always 45 degrees but that is approximately what seems to happen when I re-engage the GPSS after a manual deviation from flight plan track via HDG mode and HDG bug. I think the angle depends on the distance off track. ------------- Vince |
Posted By: cavu
Date Posted: 10 Aug 2015 at 10:18am
|
When in GPSS mode, the STEC 30 computer is receiving input from the 429 bus as DC +- deviations. Its the same type of signal that is generated when in Heading mode, the only difference is the actual heading bug is point of reference versus the deviation from the magenta line. When in Nav mode (HI or LOW) the signal is not over the 429 bus at all, so I agree that the GPSS is decoupled when in HI or LO. It will track only the CDI setting which is not over the 429 bus (as I understand it). So you've deviated from the magenta line on a "right 20 degrees" instruction, you have GPSS mode set to HEADING. Now you want to resume course. Turning GPSS mode back on will do what? Intercept the magenta line or go direct to the next waypoint? |
Posted By: chflyer
Date Posted: 10 Aug 2015 at 10:53am
|
I'm quite sure that the STEC 30 doesn't have any 429 bus input at all. The 429 bus output from the GPS goes to the GPSS which converts it to DC turn rate output to the STEC 30. In both HDG and GPSS modes, the STEC 30 is receiving its signals from the GPSS converter, not directly from the GPS on the 429 bus. That is why the GPSS is needed. It is a 429/232 converter. The GPSS unit has 2 settings: GPSS & HDG. The HDG setting means that the signals from the heading source (heading bug on the DG/HSI or CDI deviation for a LOC signal) are being passed through to the STEC 30 as you indicate. The GPSS setting means that the GPS signals are being converted to DC turn rate output to the STEC 30. Turning GPSS mode back on will convert whatever instructions it is receiving from the GPS. So the answer to the question about magenta line intercept or go direct to the next waypoint will depend on the GPS ... i.e. input from the IFD540 in this case. My understanding is that the IFD540 will give instructions to intercept the magenta line but that is probably some sort of algorithm taking into account distance from the current waypoint. It might even be instruction to intercept the next leg if position is very close to or abeam the current waypoint. Maybe someone from Avidyne can answer the question. ------------- Vince |
Posted By: cavu
Date Posted: 10 Aug 2015 at 11:35am
|
I should have been more precise, the STEC-30 receives the signal from the GPSS module via the 429 bus when in GPSS mode.
I don't think this is correct. When in the GPSS Heading Mode, the signal does not come from the IFD 540 429 bus but from the DG heading bug directly.
I think the GPSS unit is bypassed entirely when the STEC30 is set to HI or LO track mode. You can have it set to either GPSS or HEADING mode and it will still track the CDI needle.
I've posed the question to STEC folks. They have to check on it. I would like to hear from Avidyne on this. What would be transmitted over the 429 bus in this scenario? |
Posted By: chflyer
Date Posted: 10 Aug 2015 at 12:06pm
Here is the very high level block diagram of how it works, directly from the STEC GPSS POH: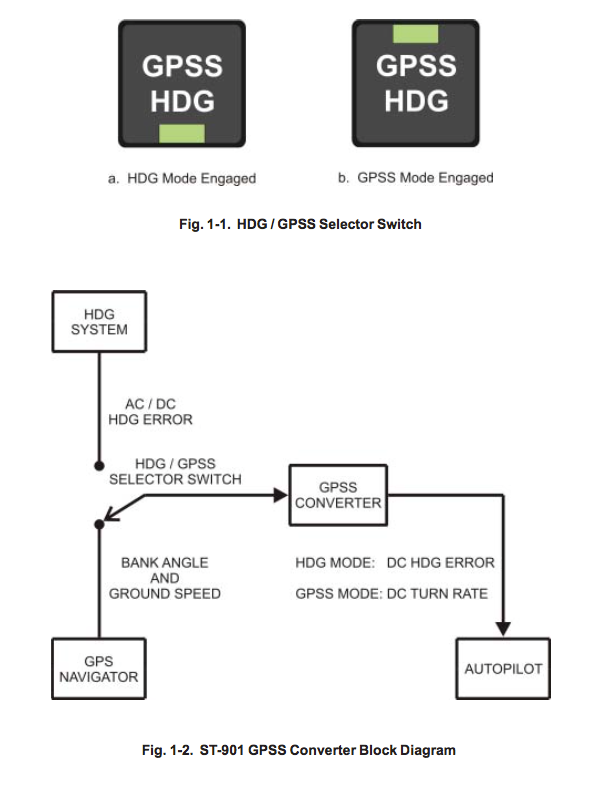 ------------- Vince |
Posted By: cavu
Date Posted: 10 Aug 2015 at 12:09pm
| The diagram does not refute my position. You don't think it does do you? |
Posted By: chflyer
Date Posted: 10 Aug 2015 at 12:31pm
|
You are correct and we agree that when the GPSS is in HDG mode, the data to the STEC 30 is coming from the DG/CDI/HSI source and not the GPS 429 bus. But the diagram does indicate that this passes through the GPSS converter and doesn't go directly from the DG/CDI/HSI to the STEC 30 bypassing the GPSS. The STEC schematics also show the DG/CDI/HSI source data going to the GPSS from where they are relayed to the STEC 30. Let's see what STEC says. In any case, there is no direct connection from the heading sources (CDI/HSI) to the STEC 30 in my implementation. I have the circuit diagrams showing the layout. The installation is over 10 years old, so there may have been changes to the STEC GPSS and/or STEC 30 capabilities in the meantime. ------------- Vince |
Posted By: cavu
Date Posted: 10 Aug 2015 at 1:03pm
|
I think we are almost there. You keep sneaking in the CDI source going through the GPSS. If the STEC30 is in Track mode (HI or LO) it does not go through the GPSS unit. Its data source is directly from the VOR Nav source (confirmed by STEC). It's only when the STEC30 is in HEADING mode that the signal comes through the GPSS unit. When the signal comes through the GPSS unit, it comes over the 429 bus when GPSS is selected and from the DG/HSI heading bug when in Heading mode (not the heading mode on the STEC30 but the heading mode on the GPSS unit). From the GPSS to the STEC30, the signal (whether from DG or IFD) is the same 43mV per degree. Surprisingly, STEC states that if diverted off the flight plan by selecting Heading mode on the GPSS and then reselecting GPSS mode, the autopilot will take you to the next waypoint not the original GPS course. I've asked this to be escalated to another person for clarification but that person is out of the office today. |
Posted By: chflyer
Date Posted: 11 Aug 2015 at 3:42am
|
I agree with all that you've just said. Regarding the STEC statement, I'm not sure how the a/p would know what it's going to get for instructions from the GPS via GPSS. I use this quite a lot. That is, I fly my GPS flight plan using the a/p and GPSS. It is the cat's meow. But occasionally the GPS plan takes me through some restricted airspace that I need to circumnavigate. As I approach it, I just set the HDG bug on the HSI to one side of it and swap from GPSS to HDG mode. As I approach the edge, I gradually turn the HDG bug back towards the next wpt or some arbitrary flt pln intercept before it. I usually leave it that way until nearly back on the magenta line before I swap back to GPSS mode. If I'm 5 or 10 miles off flt pln track and still a long ways from the next wpt and swap back to GPSS mode the a/p turns back to intercept the flt pln track in relatively short order (doesn't head to the wpt). I didn't notice the exact intercept angle (30, 45, 60), but it is definitely a close intercept of the magenta line and not dct to the next wpt. This behaviour is the same on the IFD540 as it was on my G430. ------------- Vince |
Posted By: cavu
Date Posted: 11 Aug 2015 at 8:49am
|
Vince, That makes perfect sense to me. That why I asked STEC to verify their answer. Going direct to the next waypoint seems counterintuitive. BTW, watch out for skirting Special Use Airspace. Controllers' resolution on their scopes is far less than your GPS. They will violate you for entering the airspace even though you are technically outside it. Very common occurrence. Most recommend 2 miles.
|
Posted By: oskrypuch
Date Posted: 11 Aug 2015 at 9:08am
Don't forget, with 10.1 you now CAN rubberband the active leg. You could create a loop around the restricted airspace, and still fly on GPSS! * Orest
|
Posted By: n7ifr
Date Posted: 11 Aug 2015 at 9:32am
|
Amazing, isn't it. This 540 is really spoiling me too. Tom W.
|
Posted By: oskrypuch
Date Posted: 11 Aug 2015 at 9:40am
You betcha! * Orest |
Posted By: Jrlumpp
Date Posted: 17 Aug 2015 at 10:35pm
| has anyone had any issues with the older Piper century autopilot connected to the Avidyne and a Aspen pro 1000. My autopilot flys the complete approach with course reversal perfectly but from the FAF to the missed approach, it flys slightly left of center. It will take me right to the runway, just left of the HSI centerline. The autopilot is in the heading mode with GPSS on . I will try a centering adjustment on the autopilot next. Oddly, it flys to a VOR, or intersection perfectly , dead on. Is there something I'm missing here? Thanks |
Posted By: DavidBunin
Date Posted: 18 Aug 2015 at 8:05am
| You should not be in GPSS mode after the FAF. You should be in NAV or Approach mode for the final approach segment. |
Posted By: Jrlumpp
Date Posted: 18 Aug 2015 at 8:46am
|
Thanks for the info. My older century 3 has five settings. Omni, nav, heading, localizer and localizer reverse. I will try the nav setting to see if it flys the needle after the FAF. |
Posted By: Gring
Date Posted: 18 Aug 2015 at 9:00am
| What you might be seeing is the difference in enroute scaling vs approach scaling that has higher resolution and will therefore show an off course deviation with a greater deflection of the CDI. The deflection may be there when tracking a VOR but not be noticeable where when you are driving down an ILS, LP, LPV you will see the deflection. Usually the autopilot has a set screw that can be turned to center the autopilot. |
Posted By: Jrlumpp
Date Posted: 18 Aug 2015 at 9:44am
| I will adjust if needed. What I found confusing, it flew to a GPS intersection perfectly, but didn't hold the needle centered inbound from the FAF. I had it in the GPSS mode the entire time. |
Posted By: ddgates
Date Posted: 18 Aug 2015 at 9:49am
|
Don't think you need to change modes after the FAF on a GPS/RNAV approach. You would on an ILS of course where you are required to track the localizer. Switching modes should not be required on a GPS or GPS overlay approach using GPSS. GPSS will take you all the way to the MAP, and into the missed should you activate a missed approach. Switching to NAV or APPR mode could give you problems should you wish to activate a missed approach, FWIW. ------------- David Gates |
Posted By: bellanca1730a
Date Posted: 18 Aug 2015 at 4:04pm
|
I suspect Gring is correct on what you're seeing, but re: your Century AP, HDG follows a heading input, e.g., a heading bug, while NAV and OMNI follow a course input, e.g., a GPS leg or VOR radial. The difference between NAV and OMNI is essentially in how tightly the AP brackets the course input; NAV is a little looser, which results in more gentle course corrections, while OMNI is a little tighter, which results in more immediate course corrections. Of course, LOC is even tighter for obvious reasons. I have found that OMNI works quite well for shooting GPS approaches. I do, however, like to be a bit more hands-on during turns along the approach, i.e., I like to switch to HDG mode and manually bug the airplane to the next course, then switch back to OMNI, as I have found this to minimize "hunting" after the turn. ------------- Sean Andrews Bellanca Super Viking |
Posted By: Jrlumpp
Date Posted: 18 Aug 2015 at 5:17pm
| Yes I see this but does activating GPSS change how I need to set the selector from heading to loc or nav or omni? |
Posted By: DavidBunin
Date Posted: 19 Aug 2015 at 8:39am
|
Given those options, I would use Heading mode (in GPSS submode) when flying a GPS/RNAV approach, and I would use Localizer when flying an ILS. For the ILS, I would use Heading mode (in GPSS submode) until shortly before the FAF, and switch to Localizer after the needle is alive, but before the FAF. David Bunin |
Posted By: Jrlumpp
Date Posted: 19 Aug 2015 at 10:03pm
| Thanks for the feedback. I went out today and flew approaches. The solution for a flawless GPS approach with my equipment ( 1970's century 3 autopilot, IFD 540, Aspen 1000) as follows: Set the approach in the 540, activate, power up the autopilot in the heading mode with GPSS engaged on the Aspen. Let it fly the approach. Just outside the FAF, set the selector from heading to localizer. It then flys the approach right to the runway centerline every time. |
Posted By: DavidBunin
Date Posted: 20 Aug 2015 at 9:38am
|
Good. If that method works well for you on a GPS approach, the same method will work for you on any approach type. As a best-practice from a human factors standpoint, I recommend you set your heading bug "forward" once you're on the final heading. That way, in a worst-case disengagement of any system or function, there is nothing that will attempt to fly the airplane away from the proper course/heading. David Bunin |
Posted By: Jrlumpp
Date Posted: 20 Aug 2015 at 9:56am
| Thanks |
Posted By: oskrypuch
Date Posted: 20 Aug 2015 at 10:20am
Although I don't need to swap to APPR from GPS with my equipment, on a GPS RNav approach, I always do so prior to the FAF. THe guidance provided is identical, but that allows for consistency for all approaches, whether LOC, VOR or RNav. And yes, heading bug should always be nulled, and course is set and checked on both the ASPEN (usually auto) and my second radio/CDI. This is part of my FAF checklist. * Orest |